Visual SLAMによる屋内測位でフォークリフトや倉庫の稼働率・生産性を可視化
物流施設・製造工場の作業効率と安全性を高める屋内測位システム
Guide Roboticsの屋内測位システム「GuideNS™」は、独自のVisual-Inertial SLAM技術を活用し、工場や物流施設における搬送車両、荷物、作業者などの位置を20cm単位で高精度に把握。
これにより、“見えないムダ”や非効率な動線を可視化し、作業効率の向上、安全性の強化、コスト削減を同時に実現します。さらに、常時稼働によるデータ蓄積を活かし、PDCAを回し続けることでスマートロジスティクスの継続的な改善を支援します。
フォークリフトや搬送機器の稼働率を見える化し“ムダ”を削減
- フォークリフトや搬送機器、作業者の動線が非効率でも、判断の材料がない
- フォークリフトや搬送機器の稼働率が把握できていない
- レイアウト変更や設備増設の効果を可視化できない
- ピークタイムの人手不足が慢性化
- オフピークタイムの人員過剰が見逃されている
- 混雑や交錯によるリスクが定量化されていない

Visual SLAM技術による高精度な屋内測位と稼働率分析
GuideNSは、Visual-Inertial SLAM技術を活用し、フォークリフトや搬送車両、作業者の位置を20cm単位で正確に把握。屋内環境における稼働率をリアルタイムに分析し、生産性と安全性の両立を支援します。





作業、動線、繰返、緊迫のデータを「見える化」して改善を実現
- 動線と作業密度の可視化で「無駄の検知と解消」
- 常時データ蓄積による「シフト・人員配置の最適化」
- 安全エリアの常時モニタリングで「事故予防と責任分散」
- レイアウト変更・繁忙対応の定量判断が可能
感覚や実態に頼らず、データで動線、実績、安全性を可視化
GuideNS™は、動線・稼働率・位置情報などの現場データをリアルタイムで取得・分析し、課題の本質を明らかにしながら、継続的な最適化を可能にします。
倉庫・製造工場の規模別生産性向上効果
中〜大規模施設では、人や機器の動きが複雑で“ムダ”が発生しやすく、定量的なデータに基づく改善が不可欠です。
広い現場ほど人件費や運用コストが高く、最適化の効果が大きいため、導入によるROIも高まります。
GuideNS™は、変化の多い大規模環境でこそ、継続的な改善と運用最適化に貢献します。
| 導入効果 | 業種 | 想定施設規模(目安) | 想定車両台数(目安) | 従業員数の目安 |
|---|---|---|---|---|
| ◎ | 大型物流センター | 10,000㎡以上 | フォークリフト20台以上、AGV10台以上 | 50〜150名程度 |
| ◎ | 製造工場(組立・加工) | 5,000〜15,000㎡ | フォークリフト10〜15台、AGV5〜10台 | 30〜100名程度 |
| ◯ | 食品・医薬倉庫 | 3,000〜8,000㎡ | フォークリフト5〜10台、AGV数台 | 20〜60名程度 |
| ◯ | ECフルフィルメント拠点 | 7,000㎡以上 | フォークリフト10台前後、AMR活用併用 | 40〜100名程度 |
| △ | 小規模倉庫・事業所 | 〜2,000㎡ | フォークリフト1〜3台、台車・手押し主体 | 2〜10名程度 |

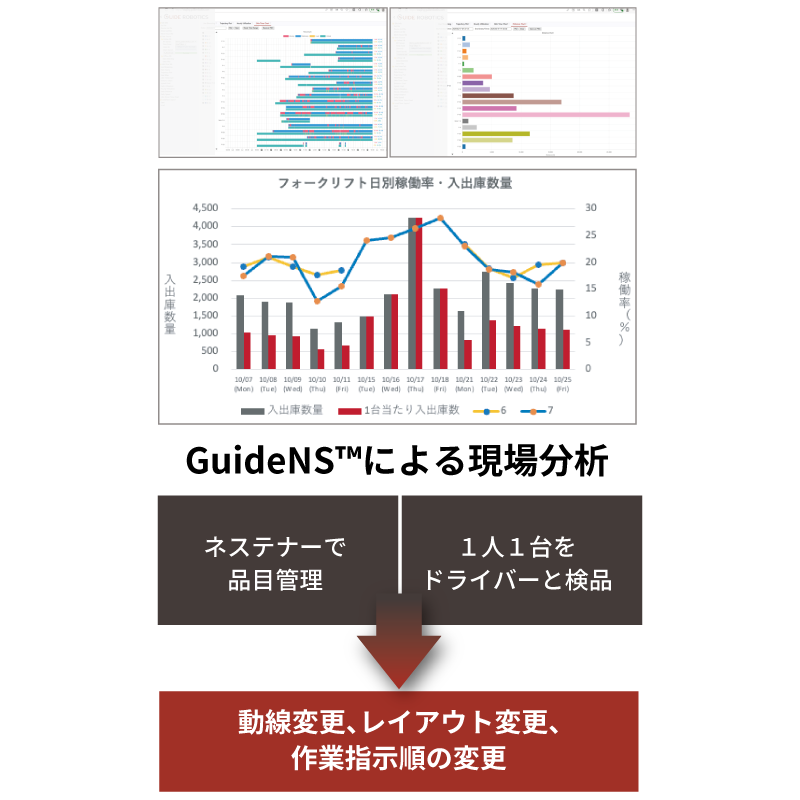
物流施設のレイアウト改善で人件費20%削減を実現
物流施設内で動線・レイアウト・作業指示を見直したことで、人件費を20%以上削減。ネステナーによる品目管理やドライバーによる自主検品を導入し、検品スピード向上・チェック漏れ防止を実現。出荷準備の効率化により人員配置も最適化されました。
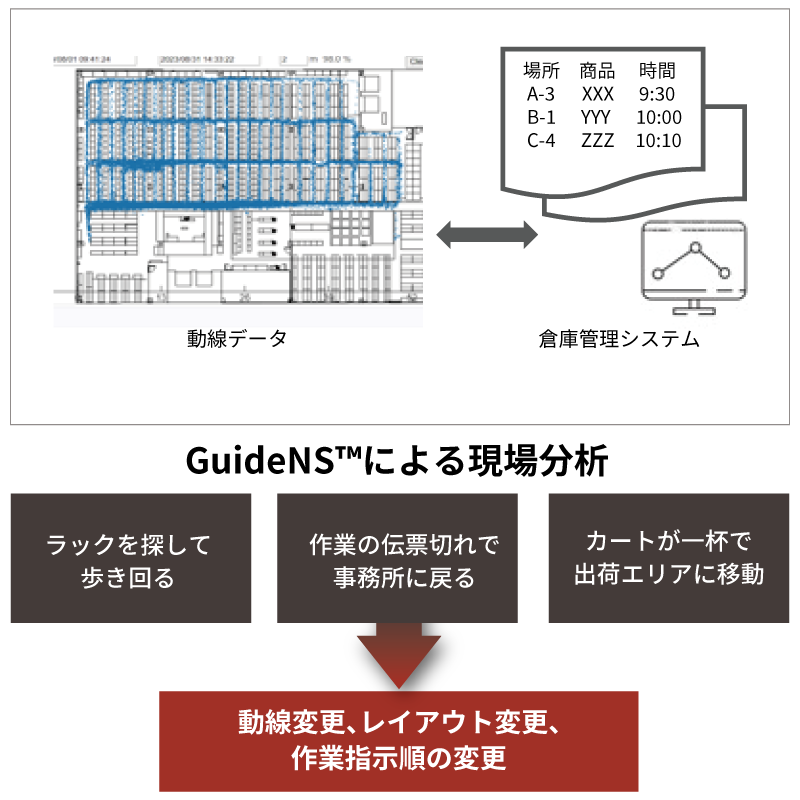
人員配置の最適化で労務コストを抑制する稼働率分析事例
作業工程や動線の見直し、レイアウトや作業指示順の最適化により、人件費の5〜10%相当の抑制効果を実現。ラックの並び替えやカート移動の導線統一により、作業員の配置が最適化され、余剰人員を不足エリアへ柔軟に再配置できる体制を構築しました。
独自のVisual-Inertial SLAMによる屋内測位の仕組み
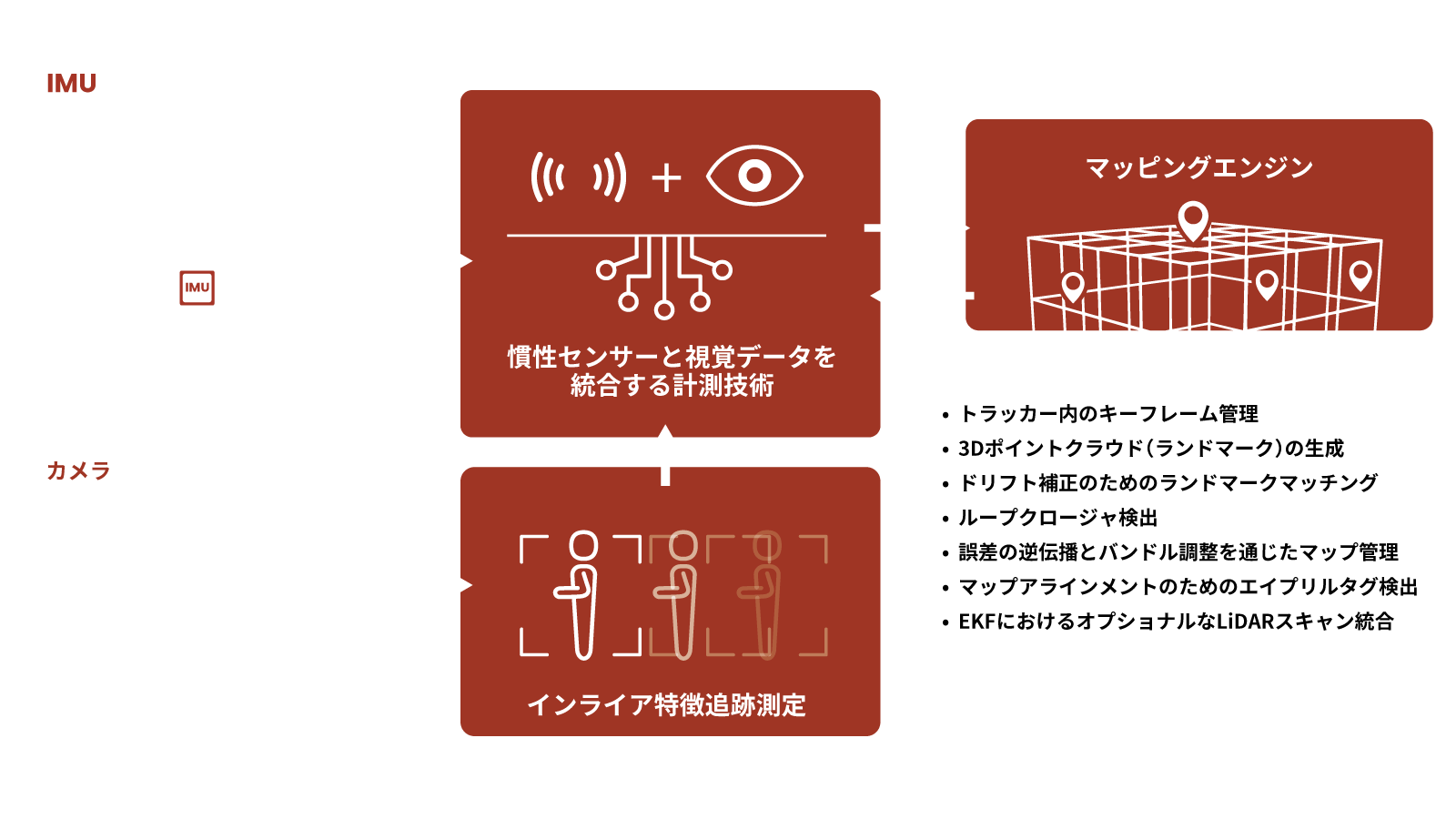
リアルタイム処理と低コストのハードウェアに最適化し、20cmの位置情報精度を実現
Visual-Inertial SLAMは、カメラの映像とIMU(慣性計測装置)の動きデータを組み合わせ、3Dマップを作成しながらセンサーの位置と方向を高精度に推定する技術です。
当社のシステムはリアルタイム処理と低コストのハードウェアに最適化され、センチメーター単位の精度を実現。
さらに、LiDARやホイールオドメトリーなどの外部センサーと組み合わせることでより高精度な位置推定が可能となります。
これにより、自律移動ロボット(AGV/AMR)をはじめとする様々な移動体の運転精度と効率の向上にも貢献します。
競合他社と比較して大きな優位性
コアの Visual-Inertial SLAM技術(外部サイト)は、 SRI International(外部サイト)が米国政府からの多額の資金提供を受けて10年以上にわたって開発およびフィールドテストを行われてきたものです。多くのオープンソースのVisual-Inertial SLAMアルゴリズムが存在しますが、当社のソリューションは競合他社と比較して大きな優位性を持っていると考えています。
ビーコン・UWBを超える20cm精度の高精度測位技術
GuideNS™は20cmの高精度測位を実現し、作業の正確性を大幅に向上させ、エラーのリスクを低減します。
さらに、遮蔽物の影響を受けにくく、設置が簡易であるため、導入が容易である点も大きな優位性です。
| 項目 | ビーコン | UWB | Guide Robotics (Visual SLAM) |
|---|---|---|---|
| 精度 | 3〜5m | 0.5〜1.5m | 20cm |
| 遮蔽物の影響 | あり | あり | なし |
| 設置工事 | 必要 | 必要 | エッジデバイス、タグマーカー設置のみ |
| エリア拡張 | 困難 | 困難 | 対応 |
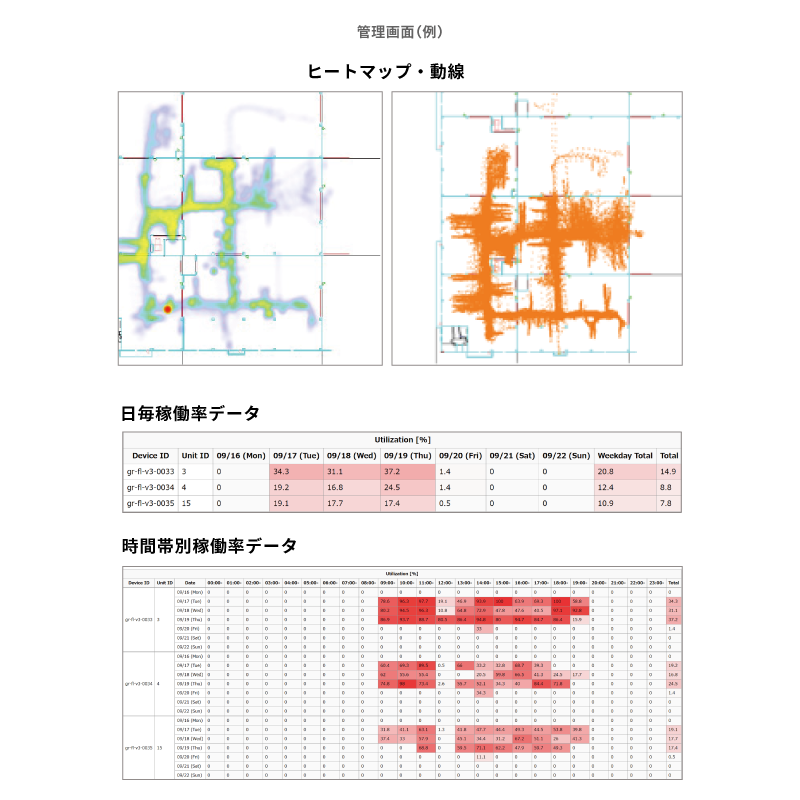
ヒートマップとタイムチャートで稼働率・生産性を分析
GuideNS™では、フォークリフトや作業者の移動履歴や稼働状況をヒートマップとタイムチャートで可視化。さらに、日別・時間帯別の稼働率データを自動で集計・分析することで、以下のような現場課題の発見と改善につながります。
数値と視覚情報を組み合わせることで、現場改善の意思決定をスピーディかつ根拠あるものに変えます。

ステレオカメラとミニPCで実現するVisual SLAM測位
物流現場の既存フォークリフトに、ステレオカメラと小型PCを搭載するだけで、Visual SLAMによる高精度な屋内測位が可能になります。
工事不要で取り付けもシンプル。作業を止めずに導入でき、リアルタイムな動線可視化や稼働状況の把握がすぐに始められます。


常時稼働データで継続的に生産性を最適化(PDCA対応)
GuideNS™は一度の分析で終わらず、現場の“今”を継続的に捉え続けます。常時取得される位置データは、改善の効果測定・安全対策・人員配置の見直しなど、現場最適化を日常的に支える資産となります。
GuideNS™導入に関するよくある質問(屋内測位・Visual SLAM・稼働率分析)
GuideNS™は、Visual SLAM技術を活用した屋内測位システムです。フォークリフトや倉庫、製造工場の稼働率分析・生産性改善を目的とした導入をご検討中のお客様から寄せられた質問をまとめました。システム構成、導入手順、運用のポイントまでわかりやすく解説しています。
GuideNS™は、天井や床への大規模な工事を必要とせず、エッジデバイスとタグマーカーの設置のみで稼働します。短期間で設置が完了し、既存環境を大きく変更する必要はありません。
GuideNS™はVisual SLAMベースの屋内測位技術を採用しており、GPSが届かない屋内でも高精度な位置推定が可能です。倉庫や製造ラインなど、遮蔽物の多い環境でも安定して稼働します。
大規模な改修は不要です。フォークリフトや作業車両にタグやセンサーを装着し、GuideNS™のVisual SLAM解析で稼働率・稼働時間を自動記録・分析します。
GuideNS™はスケーラブルな構造のため、物流施設や製造工場の増築・レイアウト変更にも柔軟に対応可能です。屋内測位範囲を段階的に拡張できます。
稼働率レポート、動線ヒートマップ、安全エリア滞在時間などの可視化が可能です。これらの分析を通じて、生産性改善・安全性向上のPDCAを現場で継続的に実施できます。
早ければ導入から1ヶ月以内に稼働率の可視化が可能です。多くの現場では、3〜6ヶ月でフォークリフト運用効率や生産性改善の成果が現れています。
屋内測位システム GuideNS 資料請求・お問い合わせ
物流・製造の現場を、もっとスマートに。
GuideNS™の導入で、効率・安全・コストの課題に答えを。
まずはお気軽にご相談ください。
Guide Robotics株式会社について
Guide Roboticsは、物流、建設、セキュリティなどの産業用途向けに業務を最適化するツールの開発を使命としています。当社は、最高のパフォーマンスと優れたコストパフォーマンスで、グローバルにサービスを提供し、屋内測位システムと自律移動ナビゲーションの分野でリーディングプロバイダーを目指しています。
2020年12月
〒100-0005 東京都千代田区丸の内2-3-2 郵船ビルディング1F